O cenário é sugestivo: dois astronautas praticam uma caminhada no espaço. No silêncio abafado do capacete, as únicas variações são representadas apenas pelo som da respiração e pela voz do Controle da Missão nos fones de ouvido.
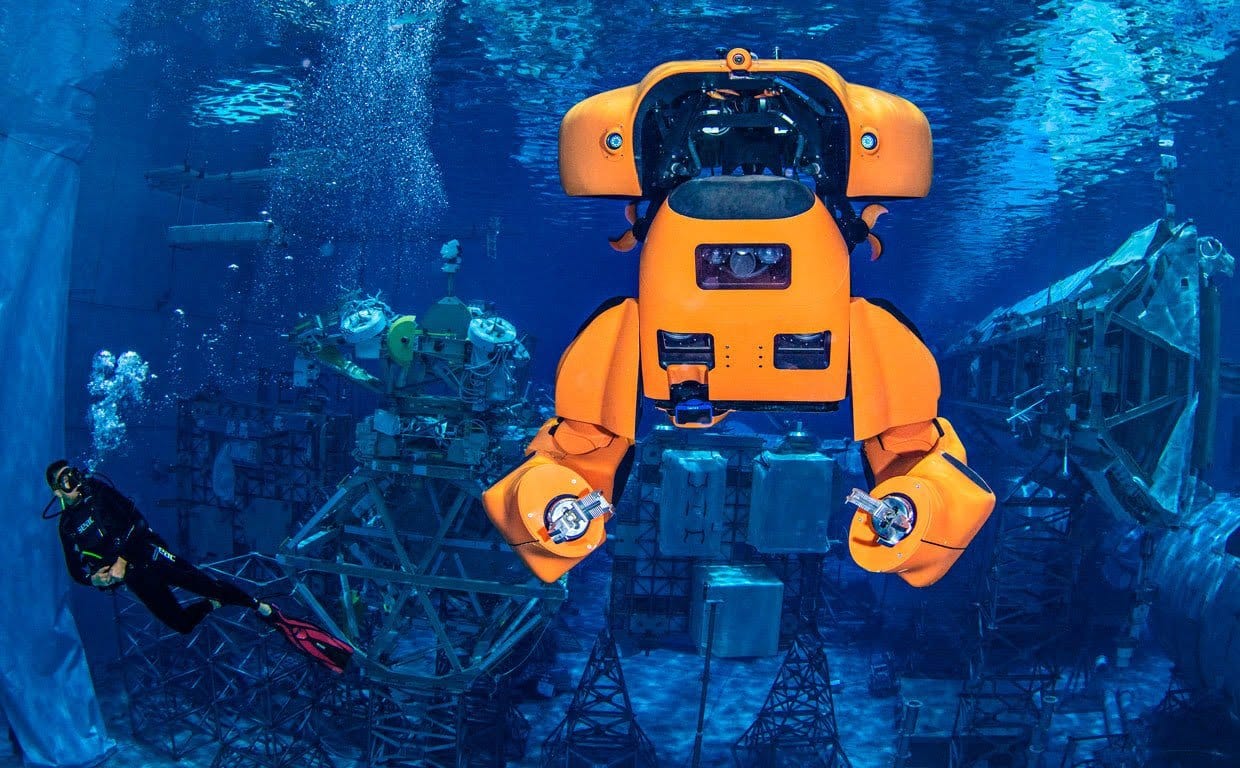
Não estamos no espaço, entretanto. Estamos em Houston, na enorme piscina que serve de ginásio aos astronautas que treinam para missões da NASA. A poucos metros dos “astronautas” que efetivamente andam debaixo de água, outro objeto partilha com eles o abismo: é o Aquanaut, um robô transformador subaquático com características verdadeiramente especiais.
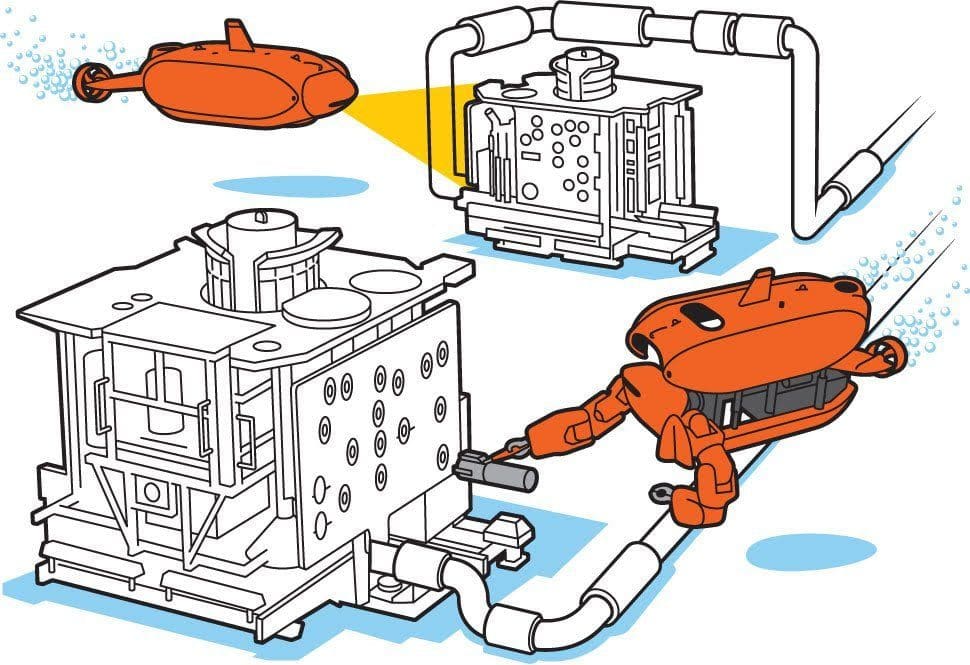
Aquanaut se move pela água como um verdadeiro submarino, mas ao contrário dos veículos não tripulados, ou UUVs (veículos subaquáticos não tripulados), possui uma capacidade extra.
Se necessário, numa reviravolta digna de cenas de filmes como “Transformers”, a parte superior do robô sobe verticalmente e mostra dois grandes braços que emergem das laterais. Uma cabeça cheia de sensores gira sobre si mesma para se posicionar no centro e a transformação é completada. Podem ter sido os anos 70 que me deram à luz, ou a cor laranja, mas algo nele ecoa o Robô Getter, se é que você me entende.
Em resumo, aqui é servido um submarino que, quando necessário, se transforma em um transformador de robô subaquático e semi-humanóide.
O Aquanaut é uma evolução radical dos UUVs, desenvolvida por uma empresa chamada Houston Mechatronics Inc. (HMI), que mudará totalmente a robótica subaquática.
Os UUVs tradicionais se enquadram em duas categorias: submersíveis de navegação rápida e mais alongados e submersíveis de coleta de amostras, que são mais robustos e lentos, geralmente presos ao barco por um cabo. A HMI pretende combinar as funções em um único robô transformador subaquático: rápido na navegação e versátil na coleta de materiais. Ninguém jamais havia tentado tal abordagem.

Aquanaut foi projetado para plataformas de petróleo e instalações offshore, ambientes complexos que atualmente utilizam tecnologias robóticas que são as mesmas há décadas. A experiência da HMI pode desempenhar um papel fundamental: 75% dos funcionários também trabalham para a NASA, ambientes extremos não são um problema.
O cofundador da HMI, Nic Radford, trabalhou em projetos de robótica avançada no Johnson Space Center em Houston por 14 anos. “E garanto que ir para o espaço é mais difícil do que mergulhar”, diz ele com uma pitada de orgulho. “Para os robôs, porém, a situação pode ser revertida. Ambientes dinâmicos, como o subaquático, podem ser de 10 a 50 vezes mais difíceis do que ambientes espaciais.”
transformação
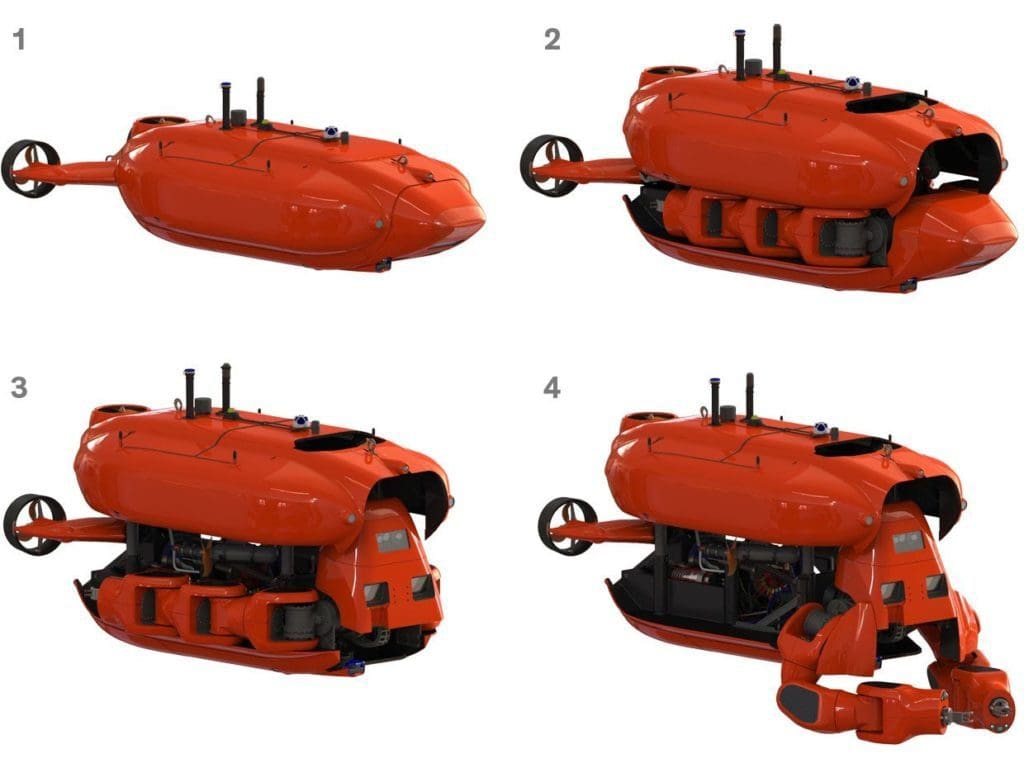
1 - Aquanaut viaja em sua configuração submarina normal para patrulhar e atravessar áreas subaquáticas. Ele pode fazer isso por muito tempo, com alcance de mais de 200 quilômetros.
2 - Uma vez no destino, o robô transforma
3 - Em apenas 30 segundos ele coloca a cabeça para fora…
4 - … e as armas para se tornarem operacionais.
A metamorfose é o resultado do trabalho de quatro atuadores lineares (e vários motores à prova de água) alimentados por uma bateria de lítio não muito diferente das que equipam os carros elétricos atuais.
Seu “cérebro” incorpora câmeras estéreo, sensores 3D e sonar.
Posso nem te contar, mas aposto que você facilmente adivinharia que nas pontas de seus braços existem “garras” robustas também equipadas com sensores.
Desde a sua criação em 2014, a HMI levantou mais de € 20 milhões em financiamento. Cinco anos depois, aqui está o verdadeiro protótipo do robô transformador subaquático que ganha vida e começa a testar em ambientes controlados.