

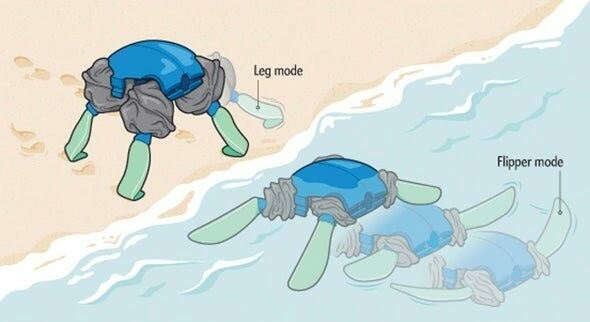
Uma nova tartaruga robótica em desenvolvimento na Universidade de Yale poderá revolucionar a exploração de regiões traiçoeiras onde a terra encontra o mar. Graças à sua extraordinária capacidade de se transformar, de fato, este robô anfíbio pode prosseguir com sucesso tanto na água como em terra. Segundo Rebecca Kramer-Bottiglio da Universidade de Yale, “A maioria dos robôs anfíbios usa sistemas de propulsão dedicados em cada ambiente, mas nosso sistema adapta um único mecanismo de propulsão para ambos os ambientes. ART (este é o nome da tartaruga cibernética) tem quatro membros que podem mudar de um estado de barbatana para locomoção aquática para um estado de perna para locomoção terrestre”.
Como funciona a tartaruga robótica ART?
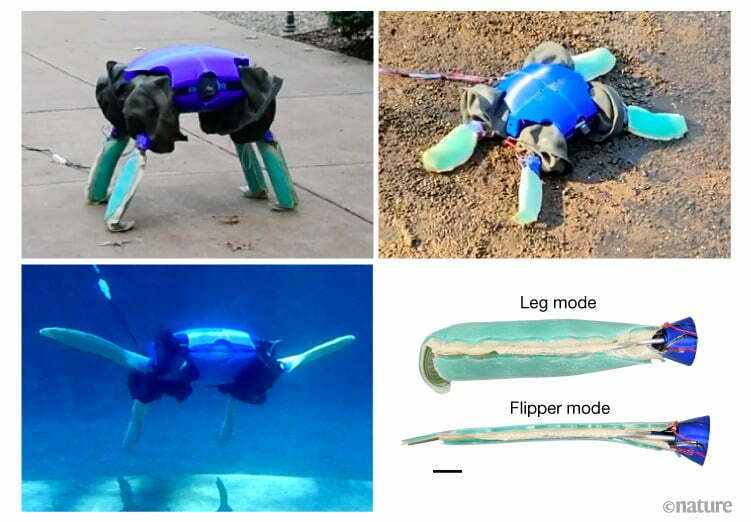
No estudo recentemente publicado na Nature (eu linko aqui), a equipe de Yale detalha como o ART funciona. Seus membros robóticos macios são uma maravilha tecnológica, projetados para mudar de forma com rapidez e precisão. Cada um deles é envolto em um material composto de polímero que amolece quando aquecido e torna-se rígido quando resfriado.
Para alterar a forma do membro, um sistema interno aquece o material externo, permitindo que um “músculo” robótico subjacente infle ou esvazie. Isso transforma uma barbatana plana em uma perna arredondada ou vice-versa. Depois que o polímero esfriar e endurecer em torno do novo formato, o processo estará completo, e isso pode acontecer em apenas dois minutos.
O chassi modular do robô é protegido por tubos de PVC selados para manter os componentes eletrônicos protegidos da água, enquanto uma carcaça impressa em 3D dá ao robô uma forma aerodinâmica e espaço para ajustar a flutuabilidade com ar ou lastro.
Robô macio e robótica tradicional em um único dispositivo
A singularidade desta tartaruga robótica (pela qual mais uma vez temos de agradecer ao biomimética. A natureza é sempre uma professora) é que ela combina técnicas robóticas tradicionais e suaves. “Ele é um verdadeiro transformista”, diz ele Toneladas Nygaard, especialista em robótica da Oslo Metropolitan University. Tradicionalmente, a mobilidade dos robôs é rígida e precisa: por outro lado, os robôs flexíveis não possuem a estrutura certa para se sustentarem em situações específicas.
ART acrescenta ambas as coisas: graças a esta abordagem, os robôs poderão mover-se com mais fluidez e adaptar-se a diferentes superfícies e ambientes. Mova-se sem ter que carregar sistemas de propulsão adicionais que possam reduzir a eficiência de seu movimento. Consumindo a mesma energia que um robô “tradicional”.
Próximos passos
A tartaruga robótica ainda está tentando chegar à linha de chegada, mas os pesquisadores estão trabalhando duro para resolver alguns problemas. Atualmente, o protótipo depende de um cabo para alimentação e comunicação, e seus movimentos ainda são um pouco desajeitados. Estou curioso para ver o que esses especialistas serão capazes de criar em alguns anos. A direção parece ser a certa e pode mudar todo o sistema de locomoção que os carros adotam atualmente.

