
A tecnologia deu-nos novas oportunidades para explorar o espaço, especialmente com robôs que provaram ser ferramentas particularmente eficazes para explorar outros planetas.
Exceto o retorno iminente à Lua, a conquista espacial humana mais próxima é a exploração de Marte. Aventura emocionante, que pode revelar vestígios de recursos, ou de vida extraterrestre passado ou presente: e se o enfrentássemos com um lagarto robótico?
De quatro no planeta vermelho
Cientistas do Universidade de Aeronáutica e Astronáutica de Nanjing eles criaram um robô de quatro patas inspirado em um lagarto que poderia ser útil para explorar Marte.
Este robô, descrito na revista Biomimética do MDPI (Vou linkar o estudo aqui), possui uma estrutura flexível que imita os movimentos e o estilo de andar dos lagartos do deserto.
No artigo, os pesquisadores Guangming-Chen, Longo Qiao, Zhenwen Zhou, lutz richter e Aihong Ji eles escrevem que, em virtude da composição do seu terreno (composto por solos granulares e rochas de diferentes tamanhos), Marte poderia ser proibitivo para os veículos pesados de hoje. Para um robô rastejante de quatro patas inspirado na locomoção de lagartos, entretanto, seria uma história completamente diferente. Abençoada é ela biomiméticasempre.
Como é feito o “lagarto espacial”?
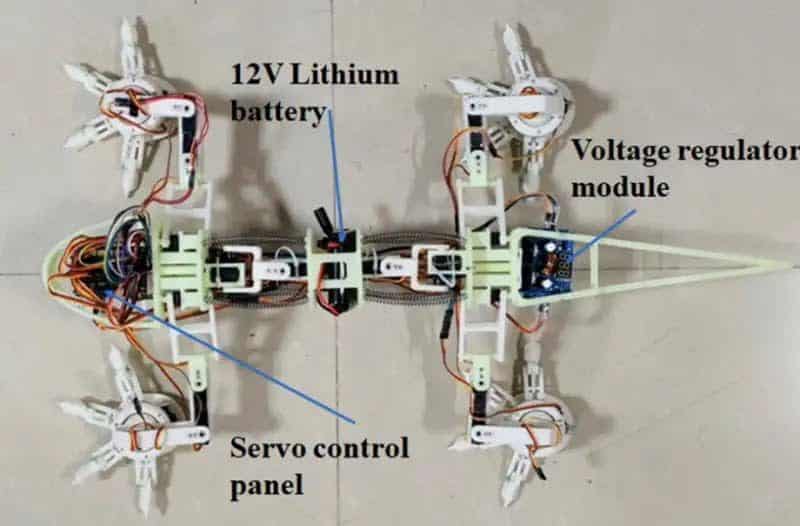
O robô biomimético criado por Chen e sua equipe consiste em uma estrutura flexível semelhante a uma coluna vertebral e quatro pernas. Para emular o movimento de “rastejar” do lagarto, cada perna possui duas dobradiças e uma engrenagem que gera uma oscilação.
As articulações do quadril que conectam a estrutura da coluna vertebral às pernas do robô são compostas por dois servomotores e um mecanismo de quatro pontos que permite ao robô ficar de pé enquanto mantém o equilíbrio. As “pernas” do robô estão equipadas com quatro “dedos” flexíveis.
“Para determinar os movimentos do robô”, lemos, “são estabelecidos modelos cinemáticos relativos aos pés, pernas e coluna, bem como a coordenação entre a coluna e as pernas”.
Os próximos passos
A princípio, os pesquisadores primeiro simularam, depois observaram (com um protótipo Impresso em 3D) o funcionamento do seu robô para ver se ele era capaz de imitar os movimentos do lagarto. Mesmo em terrenos que “imitam” a aspereza marciana. Os resultados? Muito encorajador: os movimentos e o padrão de caminhada foram reproduzidos perfeitamente.
Sim, o robô pode se mover efetivamente em ambientes rochosos, tem potencial para futuras missões a Marte. Agora precisamos de melhorias: estrutura protetora contra poeira, materiais mais resistentes, algoritmos mais refinados, sistema de alimentação contínua.
O resto é, ou melhor, será história: já posso ver esse lagarto “pateando” nas TVs do mundo todo.

